
概要
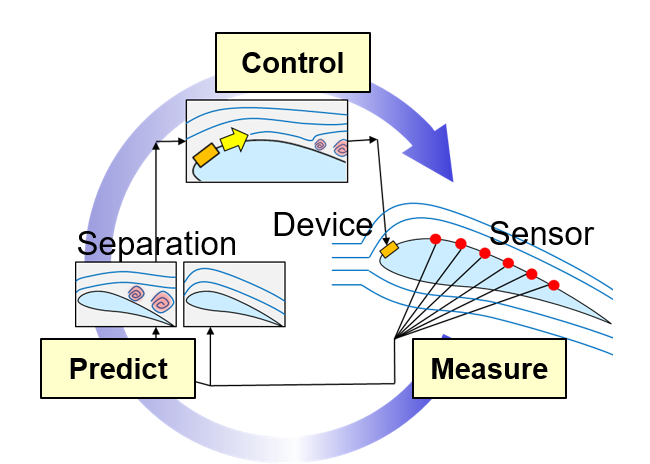
航空機まわりの空気や液体タンク内の燃料の流速や圧力などの状態を制御することで,航空機の性能の向上や人工衛星の姿勢の乱れの抑制など,流体の制御は工学において重要な役割を果たしています.一般的には,表面に凹凸を付けたり,スラットやフラップなどの可変機構を用いたりすることで工学的に望ましい状態になるように流体を制御します.しかし,これらの既存の制御では激しく変化し続ける流体に対して制御デバイスの性能を発揮しきることができません.激しく変化し続ける流体にさらされる流体機械において,さらなる性能向上のためには流体の変化に応じた制御が必要です.特に,特に流体場の状態から最適な制御入力を決定する最適フィードバック制御の実現が望まれます.下図のように最適フィードバック制御では,センサで流体の状態を観測し,未来の流体の状態を予測し,そして予測された流体の状態に応じて制御する技術が重要となります.膨大な実験のノウハウを駆使して取得したデータに統計学や数理解析学のツールを適用し,最適フィードバック制御に必要な観測・予測・制御の技術について研究しています.
流れ場のフィードバック制御
1.スパースセンシングによる流れ場観測 ~一を聞いて十を知る~
流れのフィードバック制御を実現するには限られた計測量から流れが現在どのような状態にあるかを知る必要があります.航空機の周囲の流れは非常に速いため,実時間でのフィードバック制御のためには流れ場の状態を素早く取得する必要があります.流れ場全体の流速を計測する手法に粒子画像計測法 (PIV) がありますが,PIV では流れ場の各点でのデータの処理が必要となるため時間がかかり,フィードバック制御には不向きです.そこで,限られた点でのみ PIV 処理を行い,それらの点での流速から流れ場全体の流速を推定する Sparse Sensing PIV (SPPIV) という手法を開発しました.SPPIV ではセンサ位置最適化手法によって定められた点における流速から,データから得られた低次元モデルに基づく Kalman フィルタによって流れ場全体の流速を推定します.限られた点でのみ PIV 処理を行うため,実時間でのフィードバック制御が十分可能な速さで流速場を推定することができます.また,実際の制御を見据えて,模型上の表面圧力から流速場を推定する手法の研究も進めています.
2.低次元モデルによる流れ場予測 ~未来の流れを予測する~
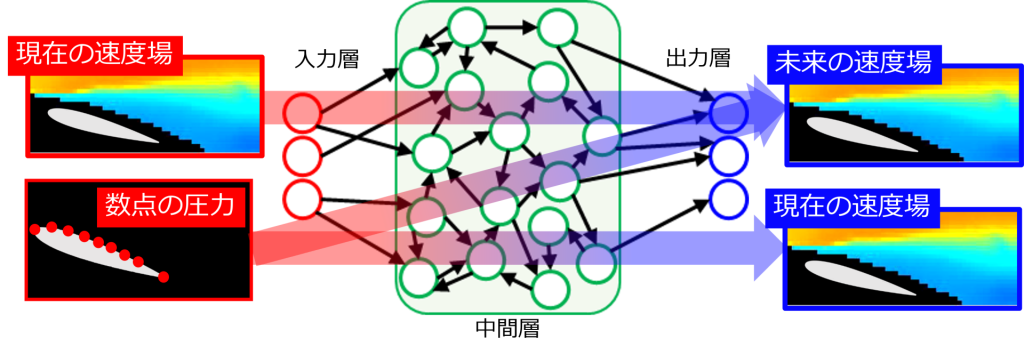
最適なフィードバック制御では,モデルによって予測される未来の流れ場の状態に基づいて最適な制御入力を決定します.このため,最適なフィードバック制御の性能を高めるには精緻なモデルを用いることが有効です.一方で,フィードバック制御では短時間に制御入力を計算することが要求されるため,精緻なモデルでありながら計算複雑性の低いモデルを用いる必要があります.そこで,本研究では,流れ場の状態を予測する低次元モデリングに関する研究を行っています.
低次元モデリングの研究の一つにリザーバコンピュータというニューラルネットワークを用いるものがあります.本研究では PIV によって得られた流速場の時系列データに対して固有直交分解 (POD) を適用して,流速場を低次元化します.そして,低次元化された流速場の時系列をリザーバとよばれる層を含むニューラルネットワークに学習させることで,流速場の低次元モデルが得られます.このモデルは非線形であるため,高い予測性能が期待できるうえ,特殊なニューラルネットワークを用いるため,比較的短時間に学習をすることができます.
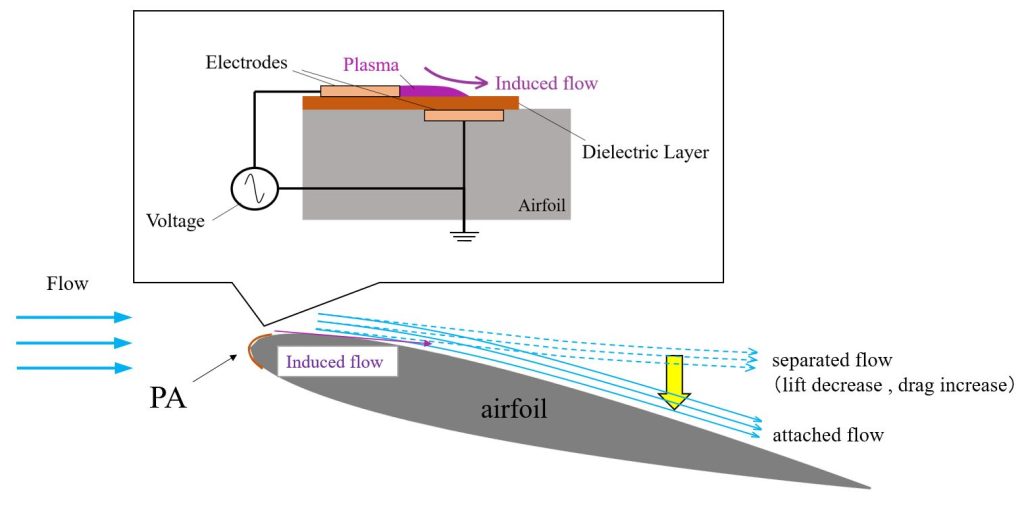
3.プラズマアクチュエータによる流れ場制御 ~自在に気流を操る~
流れの剥離は流体機械の性能を著しく低下させる場合があります.そのため,流れの剥離制御を目的とする流体制御デバイスの研究は古くから盛んに行われてきました.近年では,プラズマアクチュエータやシンセティックジェットなど高い応答性を持ち,かつ能動的な制御が可能なデバイスの研究が盛んに行われています.本研究では,プラズマアクチュエータによる流体制御の研究を行っており,空気力や圧力分布,流れの可視化などを通して翼周り流れの剥離制御効果や制御メカニズム,効果的な制御パラメタの探査などを進めています.最近では特に,迎角が高速で変化するヘリコプタブレード周り流れを模擬した実験により,動的失速流れにおけるプラズマアクチュエータの制御効果の研究を行っています.
スロッシングの最適フィードバック制御
容器内の液体の揺れはスロッシングとよばれます.液体燃料容器内で発生するスロッシングは,液体燃料貯蔵施設での火災や人工衛星の姿勢の乱れなどの問題を引き起こします.こうした問題を解決するために,地震や人工衛星の運動により発生したスロッシングを抑制することが求められます.従来,このスロッシングの抑制には容器内に平板を設置するなどの受動的なアプローチがとられてきました.本研究ではより効果的なスロッシングの抑制のため,容器内の液体の状態に基づいて最適な制御を行う,最適フィードバックによる能動的なアプローチをとります.まず,数値シミュレーションにより,スロッシングのデータを収集し,ダイナミクスを記述する低次元なモデルを導出します.この低次元モデルに基づいて,液体の状態から最適な制御入力を計算するフィードバック制御則をします.この最適なフィードバック制御則にしたがって制御を行うと無制御の場合よりも早くスロッシングを抑制することができます.